事先声明:本篇文章只是作者本人的动手感想,其内容并不属于本人的原创,早在我之前就有许多国内外网友分享过关于此内容的文章,我会在本文末尾附上参考作者的文章链接,有想动手制作的小伙伴可以参考哦。
疫情期间,一直宅家,为了活动活动,将之前在知乎上看到的很有意思的关于制作时钟机器人的文章仔细扒了一下,即使这篇文章写得非常详细,但在动手的过程中,我这个硬件小白还是被各种困难蹂躏了(被胶水蹂躏了…)。
上成品图:两张图片分别写的是11:59 和 12:00 (这里的1看起来有点像7,因为1的上面本来就有出头,下面视频中会同时写出1和7)


第一步:准备材料(具体材料列表请参考文末连接)
最主要的材料有:亚克力板、NodeMcu(或PCB)、9g舵机(算是动力装置吧,让机械臂动起来写字)、M3螺丝和螺母、还有万能的520胶水
nodemcu长这个样子: 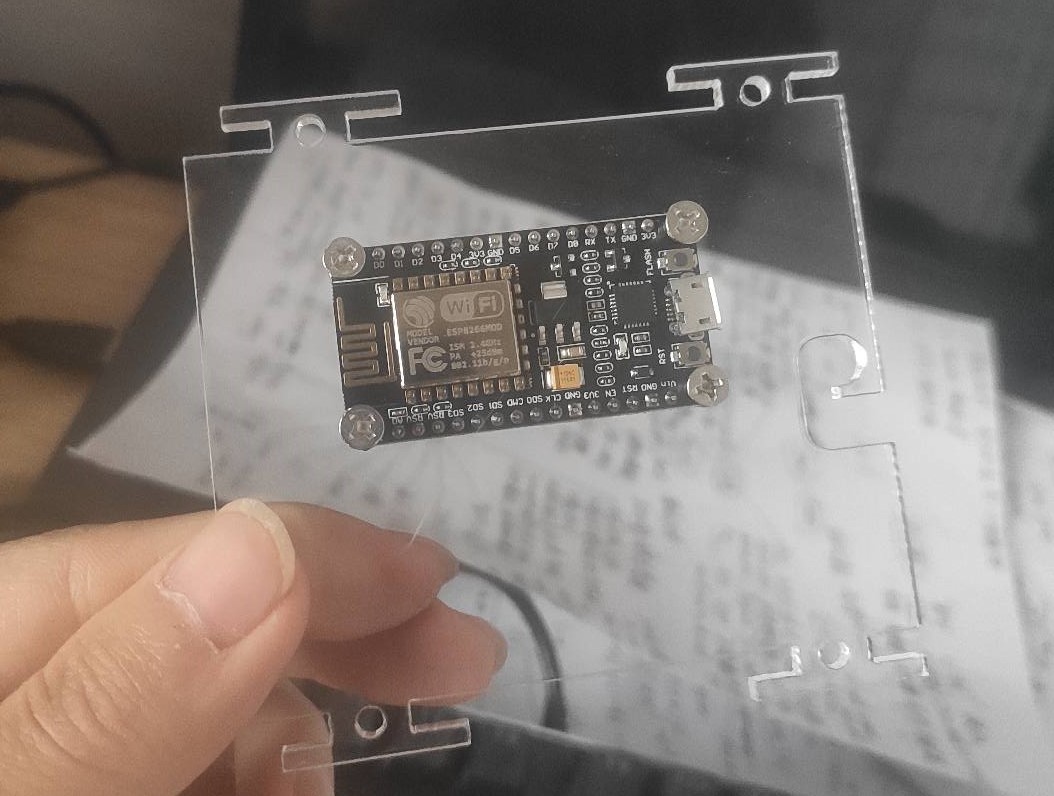
第二步:组装材料
主要是各种亚克力板的组装,关于亚克力板的组装在文末连接中描述得非常详细。我只介绍一下关于舵机接NodeMcu(如果你选择的是PCB,请略过),三个舵机分别是抬笔舵机、左、右舵机,一个舵机总共有三根线:红色(正极)、棕色(负极)、黄色信号线,其中左、右、抬笔舵机的黄线分别接NodeMcu的D1、D5、D6,其余的三根红色都接Vcc引脚,棕色线都接Gnd引脚。
对于没有接触过硬件的童鞋来说,这...咋整。不要慌,最笨的办法就是化三根为一根,再完美地接上引脚就ok了,我是直接把杜邦线暴力拆了,然后三根红线(三根黑线)只留一个引脚接口,其他两个减掉引脚接口,把绝缘皮去掉一点,然后三根线拧成一根,再用绝缘胶带包住(完美~)。有条件的童鞋,可以用电烙笔焊锡,把三根线焊到一个接口上。第三步:安装Arduino环境
去官网下载Arduino,nodemcu我记得有lua的和arduino,我买的时候只买的arduino。就是这个样子:

第四步:
链接开发板,上传程序
第五步:
上传成功后,左右舵机开始循环摆动,当他们摆动到右侧时,让开发板断电,然后调整左右舵机的角度呈L型,调整抬笔舵机的角度为45度,然后固定机械臂。
第六步:
将代码中的control.Calibrate()注释掉,重新上传代码到开发板,此时机械臂就开始正常工作了,获取到时间或天气,挥动机器臂画出来。
附上一段视频,请忽略它傻傻的样子~~
喜欢做的童鞋,可以参考稚晖君的一篇文章(讲的非常详细):如何制作一只带逗比功能的笔

